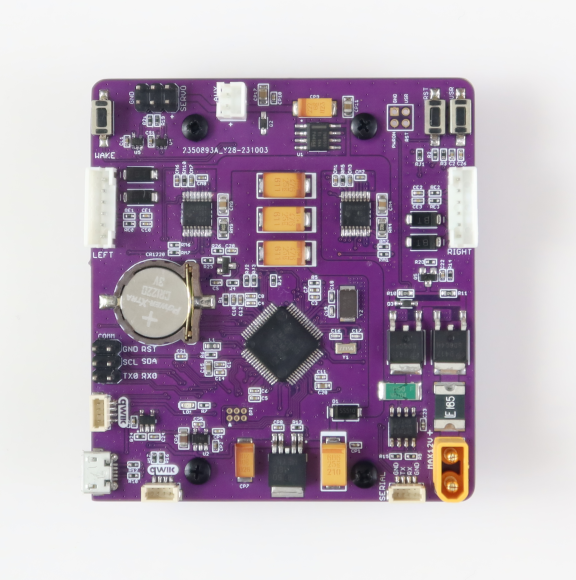
ROSRider v4
ROSRider V4 Control Card
125 USD
Packed with features and innovations, ROSRider card allows users to build ROS compatible robots with ease.
- ROS Control of differential drive robots.
- C++ based Open Source drivers for ROS2 Humble.
- Controls two motors, two servos, AUX Power.
- Measures and Reports bus voltage, bus current, independent motor current.
- PWM control, PID Speed Control or Vector Command Control modes.
- PID controller, tunable via ROS.
- On board RTC, can wake up on alarm.
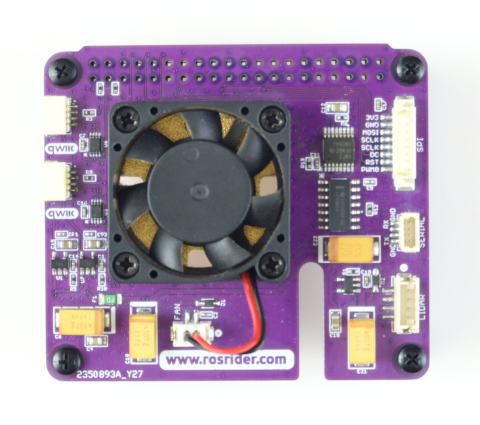
ROS2RPI v4
ROS2RPI Hat for RaspberyPI 4/5
60 USD
RPI Fan Hat, for building robots with RaspberryPI 4/5
- Software controllable dual independent I2C/QWIC ports.
- Low profile fan design.
- Software controllable LIDAR port for LDLidar STL19.
- Software switchable serial port for debuging.
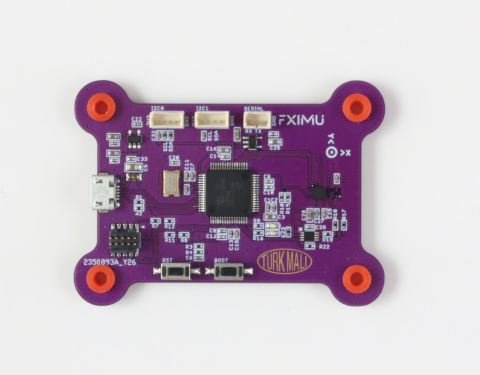
FXIMU3
FXIMU3 Inertial Measurement Unit
160 USD
FXIMU, Inertial Measurement Unit for ROS2
- 1Khz Measurement, 200hz reporting rate default.
- USB CDC connection with high speed virtual serial port. (921600 baud)
- C++ based drivers for ROS2 Humble.
- 3 axis acceletometer, gyro, and magnetometer.
Kit v1
Caretta Chassis Kit
120 USD
Just the plastic and metal parts required to build the CARETTA robot.
- Plastic Bottom Chassis, Clear Top Plate, Mounting Brackets, Plastic Screws.
- Encoder Motors, Rubber Wheels, 3D Printed Rims, and Motor Linkage Parts.
- 3D Printed Parts for Mounting Powerbank.
- All the required cables.
- CARETTA Kit does not include, ROSRider, ROS2RPI, LIDAR or RaspberryPI.
Caretta v1
Caretta Robot Complete Setup
600 USD
Included are parts and components required to build the CARETTA robot, except the battery.
- ROSRider
- ROS2RPI
- CARETTA Kit
- RaspberryPI 5 8GB
- LDLidar STL19